Il radar ha oltre cent’anni di vita e fu usato per la prima volta nel 1904 da Christian Huelsmeyer per rilevare la posizione delle navi. Le sue ben note applicazioni comprendono radar militari, controllo del traffico aereo civile e, naturalmente, i rilevatori di velocità per autoveicoli privati. Oggi si ritiene, erroneamente, che la tecnologia sia matura e che in questo campo stiano avvenendo pochi sviluppi, in realtà sia nel radar per immagini sia in quello cooperativo sono in corso innovazioni rivoluzionarie. Ciò che è davvero speciale è il modo in cui Analog Devices, Inc. (ADI) stia implementando il radar e portando software e algoritmi unici all’applicazione in campo automotive.
Da oltre un quarto di secolo ADI è attiva nel settore automotive, fornendo applicazioni sia per la sicurezza passiva che per quella attiva. Negli ultimi 15 anni, ADI è stata presente nella catena di fornitura per radar automotive con i propri DSP e data converter, così come, più di recente, con i chipset radar da 24 GHz e 77 GHz/79 GHz.
“I sistemi avanzati di guida assistita sono già qui, l’autonomia dei veicoli sta arrivando e la sicurezza su strada è di fondamentale importanza. Così, ciò che guida i nostri ingegneri è l’utilizzo delle conoscenze e delle tecnologie più avanzate disponibili sul mercato, per ottenere prestazioni e livelli di autonomia più elevati per salvare vite”, ha dichiarato Jacobs. “Secondo le nostre stime, ogni giorno i sensori per automotive, basati sui nostri prodotti, salvano otto vite.”
Nell’innovazione di hardware e software, c’è ancora molto lavoro da fare per garantire che guidatori, passeggeri e pedoni siano protetti. È necessario sviluppare una tecnologia radar più efficiente e ottimizzata, che possa fornire le stesse prestazioni elevate, funzionalità e affidabilità dei sistemi creati nell’industria aerospaziale e della difesa, trasferendole a un fattore di forma e un costo adatti al mercato degli autoveicoli privati.
Mike Keaveney, direttore della tecnologia per l’Autonomous Transportation and Automotive Safety business unit di ADI, ha affermato, “Se, da una parte, il costo di 250.000 $ per un sistema radar per immagini è un’inezia rispetto al valore di molti milioni di dollari di un carro armato militare, dall’altra risulta del tutto disallineato alle nostre vetture per uso familiare, dal costo medio di 30.000 $. Stiamo cercando il modo di adattarlo – miniaturizzarlo, renderlo più robusto e abbassarne costo, dimensioni, peso e requisiti di alimentazione, in modo che possa essere installato in qualsiasi automobile del pianeta.”
Le sfide del radar
Adottare la tecnologia radar ad alto costo e alte prestazioni, impiegata in campo militare e aerospaziale, per trasferirla in un’automobile, presenta sfide significative in termini tecnici, estetici ed economici. Il problema principale non risiede solamente nel ridurre dimensioni, peso e potenza assorbita (SWaP), ma nel migliorare le prestazioni mantenendo i costi bassi. Il radar deve essere addestrato non solo per rilevare gli oggetti ma anche per la loro classificazione. Nell’immagine radar ciò richiede una risoluzione molto più elevata di quella attualmente disponibile nei migliori sistemi reperibili sul mercato.
Quelli che seguono sono gli obiettivi che ADI ha fissato per far progredire la tecnologia, garantire la sicurezza e portare al consumatore un radar di uso automobilistico efficiente ed economico.
Prestazioni
- Aumentare la risoluzione angolare, portandola ai livelli richiesti per una guida altamente automatizzata, senza aumentare dimensioni, costo e potenza assorbita.
- Aumentare il numero dei punti di riflessione nei target a bassa riflettività.
- Ridurre in modo drastico la latenza di rilevamento, particolarmente per gli oggetti a movimento trasversale, perché migliora il tempo di risposta e permette ai veicoli di effettuare manovre evasive in caso di emergenza.
SWaP
- Ottimizzare il fattore di forma (dimensioni, peso e consumo) mantenendo nel contempo un livello di prestazioni elevato.
- Mantenere l’estetica di sistema senza compromettere il progetto industriale del veicolo.
Aspetti economici
- Implementare un radar ad alta risoluzione a un prezzo e con un fattore di forma accettabili rispetto ai limiti imposti dal mercato automotive di massa.
- Restare entro i limiti della sensibilità al prezzo degli acquirenti della vettura – sono quelli che pagano per tutto.
Regolamenti
- È necessario anche mantenere costantemente la conformità ai requisiti di sicurezza disposti dalle autorità sui sistemi avanzati di guida assistita (ADAS) (come il mandato U.S. del 2022 sulla frenatura automatica di emergenza). Il radar non sarà più un’opzione, sarà uno standard. Pertanto, è essenziale continuare a spingere verso il basso il costo del sistema, un prezzo che i consumatori possano accettare e che permetta agli OEM di conviverci, ma che continui a mantenere le prestazioni necessarie a queste impegnative applicazioni ADAS.
Più piccoli di un cellulare, gli attuali dispositivi radar per automobile possono rilevare la presenza di un grosso oggetto situato davanti, dietro o negli angoli ciechi laterali della vettura. Ma tutto questo non basta.
Radar per immagini
Il concetto di radar per immagini e il raggiungimento di una risoluzione angolare a livelli più elevati sono funzionalità auspicabili, in particolar modo per i robo-taxi. L’alta risoluzione consente non solo di rilevare un oggetto (c’è qualcosa davanti) ma anche di classificarlo (davanti c’è una bicicletta, una vettura, un adulto o un bambino).
Per ottenere una risoluzione più elevata, il radar per immagini utilizza tecniche di elaborazione di segnale a banda larga associate a beamforming digitale e phased array. Tutto questo dipende in larghissima misura dall’hardware e dalla potenza di elaborazione, dove la dimensione dell’antenna varia secondo la risoluzione angolare desiderata, mentre il numero dei canali aumenta per equipaggiare la superficie dell’antenna delle dimensioni richieste. “Aumentare l’impiego di hardware costoso per risolvere il problema è una modalità a “forza bruta “ per offrire una risoluzione più elevata, presentandola come soluzione,” ha affermato Chris Jacobs.
Attualmente, ADI sta lavorando a stretto contatto con i principali OEM e produttori “tier 1” sullo sviluppo di nuovi approcci rivoluzionari, per migliorare il radar e affrontare le sue sfide più recenti. Per come è implementato nelle autovetture del giorno d’oggi, il radar offre una risoluzione piuttosto grossolana. Tutto ciò che vede è una massa informe. Può rilevare qualcosa attorno a una vettura – si può trattare di un motociclo, una persona o un grosso autocarro – ma non è in grado di identificare l’oggetto. Aumentando la risoluzione, attraverso i progressi compiuti dalla tecnologia di rilevamento hardware e dagli algoritmi software, il radar può discernere vari attributi in ciò che vede – portandoci un passo più vicini a un veicolo completamente autonomo e sicuro.
Il problema della risoluzione e la sfida della separazione degli oggetti
L’attuale radar convenzionale per automotive offre una risoluzione angolare orizzontale da 10° a 20° circa, in un campo visivo piuttosto ampio.
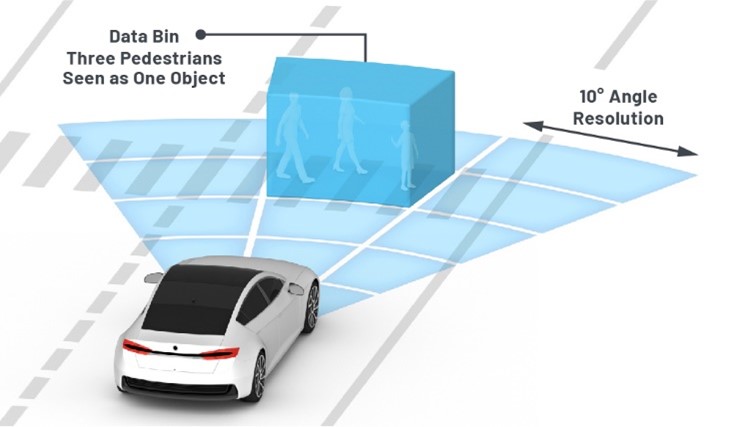 Figura 1. Radar a bassa risoluzione e oggetti nascosti. Con una risoluzione angolare da 10° a 20°, oggi piuttosto comune per i radar “non-imaging”, i tre pedoni vengono visti dal radar come un oggetto unico.
Figura 1. Radar a bassa risoluzione e oggetti nascosti. Con una risoluzione angolare da 10° a 20°, oggi piuttosto comune per i radar “non-imaging”, i tre pedoni vengono visti dal radar come un oggetto unico.
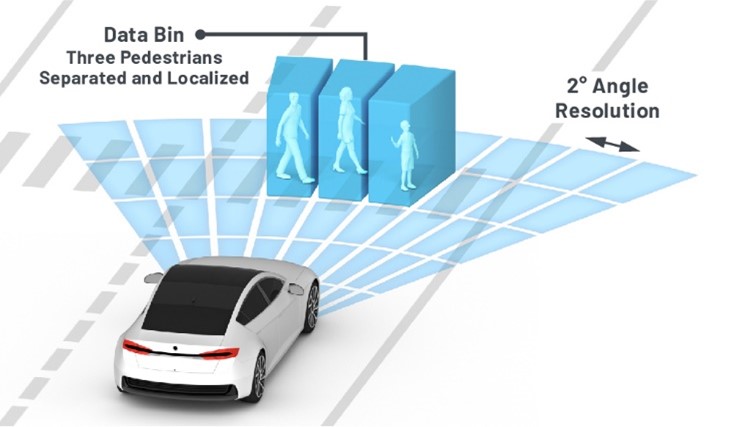
Figura 2. Il radar per immagini ad alta risoluzione rivela gli oggetti nascosti.
Radar per immagini con risoluzione angolare da 1° a 2° gradi—un incremento di 10 volte rispetto alla risoluzione di un sistema “non-imaging”. I data bin delle informazioni, con risoluzione da 1° a 2°, separano e localizzano i tre pedoni.
Elaborazione dei dati
Il prezzo da pagare per una risoluzione più elevata consiste in una maggior quantità di dati da gestire; all’aumentare della risoluzione, il volume di dati si incrementa di pari passo, rendendo necessaria una maggiore potenza di calcolo. Ecco perché è essenziale disporre di uno schema per elaborare in modo efficiente tutti i dati, per gestirne il volume elevato mantenendo bassi i consumi energetici. Un’elaborazione efficiente, centrale o periferica sarà fondamentale per il futuro del radar.
Il passo successivo: radar cooperativo e necessità di comunicazione
“Il radar cooperativo, che utilizza l’hardware del sensore radar esistente della vettura, è la strada del futuro in campo automotive,” ha affermato Mike Keaveney. “Il radar cooperativo si basa tutto sulla coerenza e sul riconoscimento delle necessità – in questo caso, radar di rilevamento – per creare in cooperazione un’immagine coerente ad alta risoluzione. Quando il radar cooperativo potrà funzionare in modo economico, presenterà innumerevoli vantaggi.”
Il radar cooperativo può fornire le prestazioni del radar per immagini senza accrescere in modo significativo le dimensioni dei singoli sistemi radar esistenti nelle vetture. Ciò avviene perché, in questo caso, l’apertura effettiva è determinata dalla distanza tra due (o più) sensori radar distribuiti con campi visivi in sovrapposizione – non predefinita dalla dimensione fisica di uno qualsiasi dei sensori.
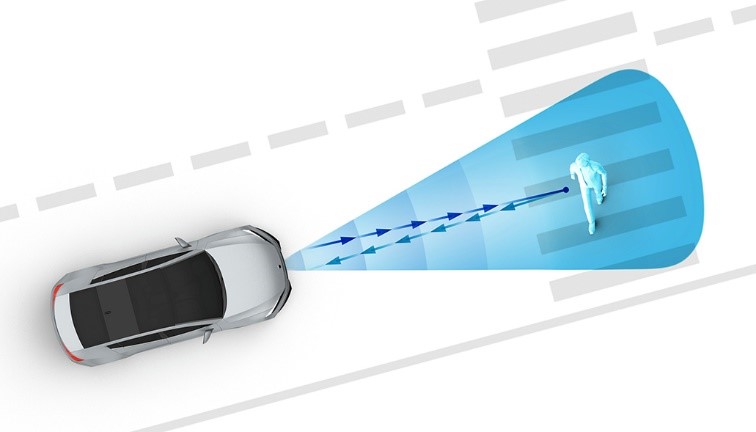 Figura di 3. Apertura di campo limitata del radar primario. Il radar primario è quanto viene usato oggi, comunemente, nelle autovetture.
Figura di 3. Apertura di campo limitata del radar primario. Il radar primario è quanto viene usato oggi, comunemente, nelle autovetture.
La trasmissione radar da ciascuna sorgente viene riflessa da un oggetto e ritorna al punto di origine. L’apertura, o prestazione nel radar primario, si misura in pollici – la larghezza dello stesso trasmettitore radar.
L’apertura maggiore del SuperRADAR/Radar cooperativo
Il SuperRADAR rappresenta l’approccio di ADI per raggiungere la coerenza in modo algoritmico utilizzando raggi radar multipli che dispongono di campi visivi in sovrapposizione.
Il radar cooperativo basato su SuperRADAR utilizza un collegamento a bassa velocità per la sincronizzazione grossolana tra le sorgenti radar. Ciascun sensore invia i dati al processore centrale, oppure può inviare i dati da un radar a un altro e far svolgere l’elaborazione da un sensore periferico, che rappresenta un approccio più economico.
“I sistemi tradizionali di radar cooperativo non sono di facile implementazione, data la necessità di gestire un collegamento ad alta frequenza tra i radar.” ha dichiarato Chris Jacobs. “Associati al raggiungimento di questo tipo di coerenza, vi sono costi sostanziali e un notevole overhead, entrambi dipendenti dall’hardware.”
Per il radar in campo automotive c’è un imperativo enorme per migliorare il rapporto prezzo-prestazioni del radar cooperativo.
“Il vecchio sistema di aggiungere semplicemente solo hardware alla vettura non è la soluzione. Dobbiamo adottare una nuova filosofia di pensiero per risolvere il problema.” ha dichiarato Jacobs. “Esistono modi intelligenti con i quali possiamo combinare algoritmicamente queste tecnologie per aumentare le prestazioni complessive di sistema utilizzando lo stesso hardware. L’approccio SuperRADAR di ADI permette al sistema radar di produrre una sovrapposizione coerente di una moltitudine di immagini non coerenti.”
Radar cooperativo
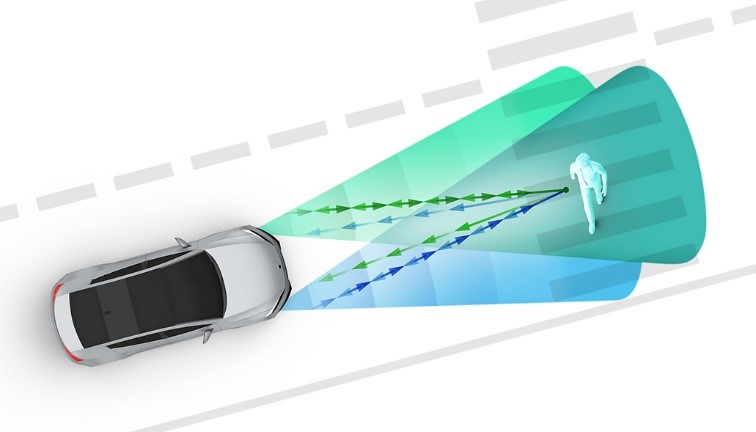 Figura 4. L’apertura più ampia del radar cooperativo.
Figura 4. L’apertura più ampia del radar cooperativo.
Come funziona il radar cooperativo? Il segnale trasmesso da ciascuna sorgente viene riflesso da un oggetto e catturato da entrambi i ricevitori radar. Di conseguenza, si avrà 2 volte la visione (o due viste differenti) dello stesso target e un tempo doppio destinato al target, in confronto a una visione unica e una sola unità di tempo disponibili con il radar primario. Inoltre, poiché entrambi i radar funzionano in cooperazione, l’apertura radar (proporzionata alle prestazioni) diventa equivalente alla sezione frontale della vettura – la distanza tra i due radar situati negli angoli (approssimativamente 1,2 m), in confronto ai pochi centimetri del radar primario.
Questo approccio consente di realizzare progetti con sensori economici che possono essere collocati in vari punti attorno al veicolo per supportare un rilevamento e una classificazione degli oggetti di livello superiore.
I vantaggi del SuperRADAR: 1 + 1 > 2
Il SuperRADAR non riduce soltanto lo SWaP ma aumenta le possibilità del sistema, raggiungendo una risoluzione più elevata e utilizzando, contemporaneamente, molto meno hardware, aumentando in questo modo le prestazioni dell’applicazione a costi più ragionevoli.
Più punti di riflessione: doppio tempo sul target
Il SuperRADAR fornisce il doppio delle prestazioni utilizzando la stessa quantità di hardware. In alternativa, l’approccio può mantenere le medesime prestazioni, utilizzando la metà del numero di canali radar. Chris Jacobs ha affermato: “Con il SuperRADAR otteniamo una risoluzione doppia rispetto a quella raggiungibile da un singolo radar. Sarà necessario aumentare la potenza di calcolo, ma il percorso evolutivo di DSP/MCU di grado automotive può rispondere in modo adeguato a tali requisiti di elaborazione.”
Il SuperRADAR è, in effetti, una fusione di radar: fondiamo la visuale dei due radar indipendenti e, come risultato, otteniamo una risoluzione migliore di quella che avremmo potuto acquisire se avessero operato in modo indipendente. Jacobs ha aggiunto: “La fusione diverrà il modo standard di implementare l’ADAS in futuro.”
Latenza ridotta: calcolare, rapidamente, la velocità laterale, salva delle vite
Un aspetto di interesse primario, nei sistemi di gestione immagine di un veicolo, è la capacità di calcolare rapidamente la velocità laterale – quella di un oggetto che viaggia ortogonalmente (ad angolo retto) rispetto al senso di marcia del veicolo. Tuttavia, anche i migliori algoritmi di machine learning, in gran parte basati su telecamere per rilevare il movimento laterale con un numero di falsi allarmi sufficientemente ridotto, richiedono un tempo di circa 300 ms. Per un pedone che cammina davanti a un veicolo che viaggia a 90 km/h, i millisecondi possono rappresentare la differenza tra rimanere illeso e trovarsi in pericolo di vita; per cui il tempo di risposta è un fattore critico.
Il ritardo di 300 ms è dovuto al tempo richiesto per il calcolo del vettore delta ricavato da 10 frame video successivi, il numero necessario per un rilevamento affidabile con una percentuale di falsi allarmi accettabilmente bassa. Il SuperRADAR, tuttavia, grazie all’ampia apertura effettiva e al modo in cui combina in modo coerente le immagini che provengono da due o più sensori, ha la possibilità di calcolare in modo accurato tanto la componente tangenziale, quanto quella radiale della velocità, in un singolo ciclo di misura di 30 ms (questa latenza è 10 volte più breve di quella dei migliori sistemi attualmente reperibili). Questa bassa latenza di rilevamento è inferiore al tempo di reazione di 100 ms, tipico di un pilota di Formula 1 e molto al di sotto di quello di un guidatore comune!
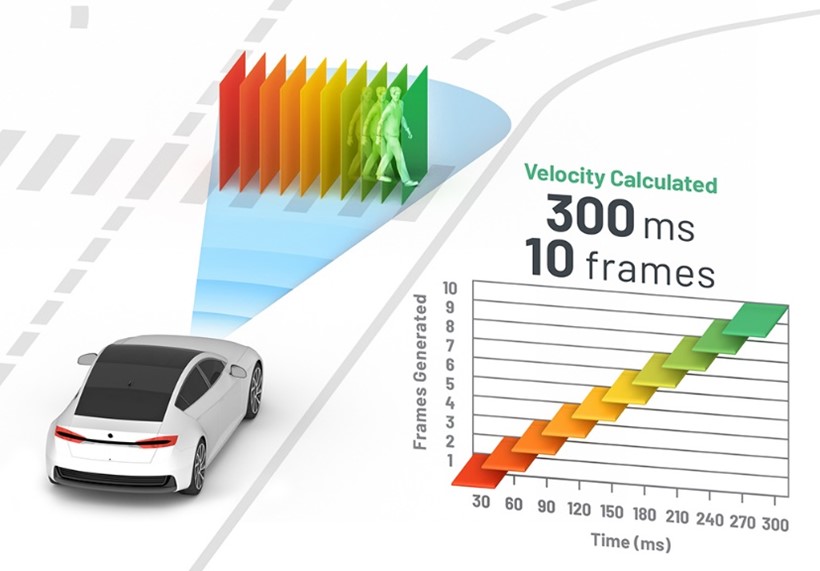 Figura 5. I sistemi per immagine odierni hanno un tempo di latenza di 300 ms e richiedono 10 frame per rilevare un movimento ortogonale.
Figura 5. I sistemi per immagine odierni hanno un tempo di latenza di 300 ms e richiedono 10 frame per rilevare un movimento ortogonale.
Utilizzando la tecnologia radar odierna per rilevare il movimento di qualcuno che stia attraversando la strada, è necessario utilizzare un sistema a telecamere multiple. Ciascuna immagine richiede 30 ms, per 10 immagini servono 300 ms. Durante questo intervallo di tempo, la vettura si sposta di qualche metro.
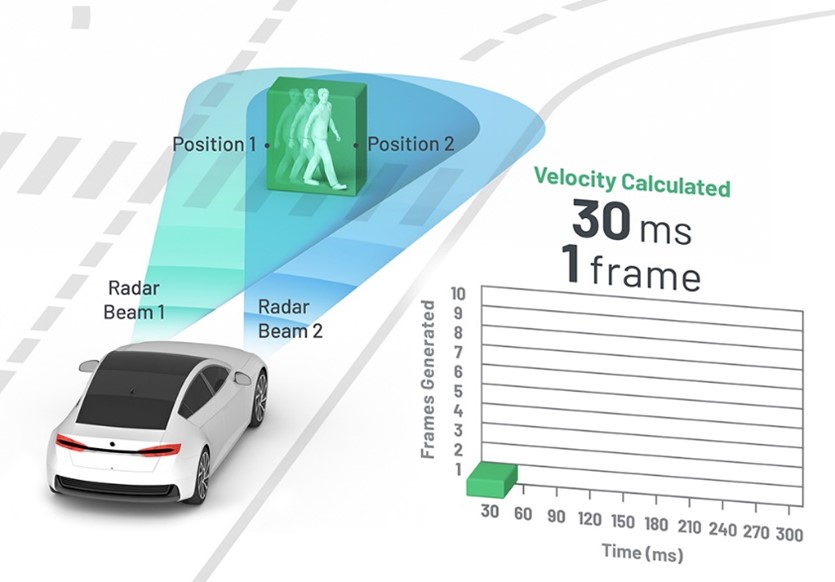 Figura 6. Per rilevare il movimento ortogonale, i sistemi SuperRADAR hanno una latenza di frame di 30 ms.
Figura 6. Per rilevare il movimento ortogonale, i sistemi SuperRADAR hanno una latenza di frame di 30 ms.
Con due radar che lavorano in cooperazione, poiché le due sorgenti sono distanziate, la triangolazione diventa possibile catturando l’oggetto in movimento. Tutto ciò che serve è identificare la persona prima dalla Posizione 1 con il Radar Beam 1 poi, 30 ms dopo, dalla Posizione 2 con il Radar Beam 2. Questo fa sì che il sistema in vettura sappia dove si sta muovendo la persona.
Il SuperRADAR permette di riconoscere un oggetto in movimento, che attraversa il percorso di marcia della vettura, in un decimo del tempo impiegato da un radar per immagini di tipo convenzionale.
Gli aspetti economici del SuperRADAR
Il concetto di SuperRADAR non rappresenta soltanto un metodo efficiente per ridurre il costo complessivo del sistema, ma ha anche un impatto sui requisiti di prestazione e accresce il valore dell’applicazione finale.
Chris Jacobs ha affermato “Ciò che si desidera è ottenere il livello di prestazioni del radar per immagini, che al momento si trova soltanto in costose applicazioni per robo-taxi, ed eliminare tutto l’hardware più costoso, abbassando il prezzo fino a un livello che l’utente di un veicolo privato possa permettersi. Qui è dove entra in gioco il SuperRADAR, con un ingombro hardware minimo e un software che lo gestisce per produrre il doppio delle prestazioni.”
Il futuro delle automobili
Guardando al futuro, le automobili richiederanno una riprogettazione radicale dei sistemi attuali. L’aspetto delle piattaforme del veicolo del domani è molto diverso da quello odierno.
Con l’enorme esperienza e competenza in settori verticali, ADI è in una posizione unica per apportare più valore alle applicazioni finali, attraverso una combinazione di offerte hardware e software per ottimizzare le esigenze di elaborazione del radar nelle vetture del domani. Questo approccio per algoritmi affronta direttamente le sfide relative ai costi di gestione complessivi, o “Total Cost of Ownership” (TOCO), rivolgendosi ai produttori di auto, oggi e in futuro.
Il SuperRADAR offre innumerevoli possibilità che sono ancora tutte da esplorare. La tecnologia non è soltanto una soluzione più efficiente e conveniente per il progresso dell’ADAS ma, in ultima analisi, salverà delle vite.
di Chris Jacobs, Analog Devices