
E’ stata recentemente messa a punto, grazie alla collaborazione tra TGW e KEBA, la prima soluzione il cui focus è l’ottimizzazione di un sistema a prelievo singolo nel commissionamento automatizzato.
Genesi e sfide del progetto di Keba con TGW
La soluzione prevedeva processi a doppio prelievo svolti in modalità simultanea attraverso il riconoscimento di due contenitori di origine e di destinazione effettuato nello stesso momento. Il sistema richiedeva un robot in movimento continuo per poter effettuare il riconoscimento alternato del contenitore. Per questo progetto era necessaria una soluzione customizzata in grado di coordinare e gestire il robot e i suoi sei assi nello spazio e, sebbene il funzionamento avvenisse a velocità elevate, avrebbe dovuto evitare “scossoni”. La particolare disposizione degli assi meccanici era un requisito fondamentale per coprire un’area di movimento rettangolare (che includeva anche le zone periferiche). La sfida era individuare il tipo di robot più adatto a coprire l’area operativa.
Un’opzione scartata fin dall’inizio è stata quella di impiegare un robot standard ma dalle dimensioni più grandi poiché, nonostante la capacità di muoversi lungo tutta l’area, la sua grandezza avrebbe prodotto movimenti molto meno dinamici, approssimativi e con un basso livello di controllo. Non meno importante, tra gli altri requisiti vi era l’esigenza di un sistema facile da programmare, con linguaggio standard (IEC), e che fosse altamente flessibile. Con questo approccio sarebbe stato possibile implementare espansioni e add-on per supportare l’integrazione di software personalizzati.
Inoltre, l’opzione PROFINET Slave disponibile sul Motion Controller Keba ha consentito di soddisfare un altro requisito importante ovvero la necessità di utilizzare un controllore Siemens.
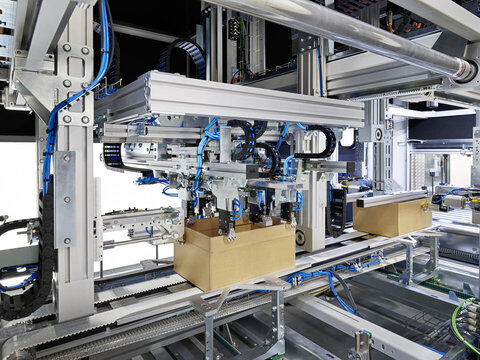
Il sistema compatto Rovolution di Keba ha consentito di effettuare un prelievo completo in un tempo inferiore ai 4 secondi e il vantaggio di impiegare un robot dalle dimensioni più contenute, capace di operare mantenendo distanze molto piccole dalle protezioni perimetrali.
La sfida delle dimensioni degli imballaggi
Il portfolio misure dei cartoni da imballaggio a disposizione delle aziende il più delle volte è standard, pertanto non sempre i formati risultano consoni alle spedizioni: o troppo grossi, o troppo piccoli, o troppo larghi o troppo stretti, ecc. Spesso le misure standard obbligano a modificare le dimensioni non appena i cartoni vengono riempiti con il materiale. Ridurre le dimensioni dei cartoni presenta però il vantaggio di avere più volume a disposizione nei vani di carico dei mezzi di trasporto.
Per meglio comprendere questo aspetto consideriamo che la riduzione del 20% del volume degli imballaggi equivale ad avere il 20% in più di spazio su furgoni e camion. Con questo sistema, le aziende riducono il numero di formati base rinunciando anche al materiale da imballaggio. Questa pratica mette in evidenza sia l’aspetto sostenibile che quello pratico ovvero una quantità di tempo inferiore, una volta aperta la confezione, per identificare gli articoli all’interno degli imballaggi.
Adattamento dei formati automatizzato
Una volta scelto il robot, e determinato l’insieme dei movimenti all’interno dell’area, era necessario risolvere il problema del numero di fasi di lavoro effettuate manualmente. Sebbene fossero stati integrati i sistemi di protezione, questa fase presentava per gli operatori rischi di lesione durante il processo di taglio dei cartoni ricevuti. TGW ha progettato un sistema specifico per l’apertura automatizzata dei cartoni con due obiettivi; azzerare il rischio di infortuni ed elevare la velocità di esecuzione delle operazioni. In questo progetto la sfida era davvero complessa poiché emergevano problematiche come le dimensioni dei cartoni non più standard e l’eventualità di riceverli deformati o danneggiati a causa del trasporto.
Per questi motivi, TGW ha previsto il rilevamento delle misure di ogni cartone prima della sua apertura: un’unità di dimensionamento (che è stata integrata nel sistema) costituita da telecamere combinate, rileva misure, scostamenti o irregolarità di lunghezza, larghezza e altezza. Con il rilevamento automatizzato delle misure gli assi robot sono stati predisposti per adattarsi alle dimensioni del cartone consentendo alle lame un taglio di precisione dei cartoni. Il taglio dei coperchi è stato predisposto per non andare in profondità rischiando di danneggiare il relativo contenuto.
Altro requisito richiesto è quello che sia il riduttore di altezza che l’apri-cartone potessero eseguire un movimento simultaneo assolto da molti assi. In questo caso, a differenza del sistema di riconoscimento e prelievo, i robot standard non sarebbero stati adatti, pertanto si è preferita una soluzione a portale che potesse essere customizzata adattiva e dalle dimensioni sufficientemente compatte. Il riduttore di altezza e l’apri-cartone richiedevano un totale di 19 assi di lavoro pertanto è stato adottato il sistema multiasse KEBA. Il sistema multiasse KEBA consente di dislocare i relativi dispositivi – un controllore di sistema, un alimentatore da 10 kW e sette controllori assiali da tre assi ciascuno – in soli 50 cm di larghezza. Il risultato di questo progetto è stata una macchina in grado di adattare e lavorare senza il minimo problema ben 900 cartoni l’ora.
I vantaggi della soluzione KEBA hanno convinto TGW ad implementarla su tutti i macchinari destinati al confezionamento dei cartoni. Oltre alla modifica del riduttore e dell’apri-cartone, l’implementazione del sistema multiasse KEBA verrà effettuato anche su macchine dotate di formatore di cartoni e coperchiartici.