
Secondo Thomas Brand, Senior Field Applications Engineer, Analog Devices, la misurazione della distanza e il rilevamento degli oggetti giocano un ruolo significativo in numerose aree, tra cui automazione industriale, applicazioni di robotica e logistica. Specialmente nel contesto della sicurezza, sono richiesti il rilevamento e la reazione a oggetti o persone a distanze specifiche. Per esempio, un braccio robotico può avere bisogno di fermarsi immediatamente quando un lavoratore entra nel suo raggio di azione.
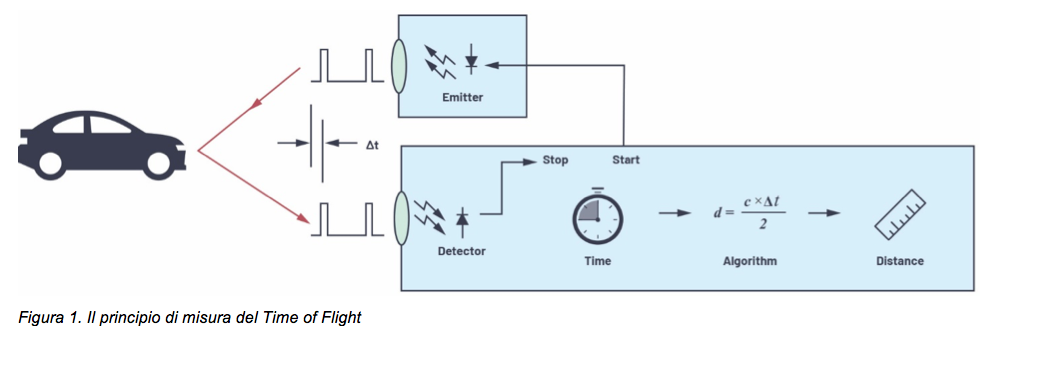
Il Time of Flight (ToF) sta diventando sempre più importante per questo scopo. Con la tecnologia ToF, la luce viene emessa da una sorgente modulata, ad esempio un laser, e i raggi di luce riflessi da uno o più oggetti vengono rilevati da un sensore o da una telecamera. La distanza può quindi essere determinata per mezzo del ritardo ∆t tra l’emissione della luce e la ricezione della luce riflessa. Il ritardo è proporzionale al doppio della distanza tra la telecamera e l’oggetto (andata e ritorno). Pertanto, la distanza può essere stimata come la profondità d = (c × Δt)/2, dove c è la velocità della luce. Una telecamera ToF fornisce quindi dati 2D oltre alle informazioni sulla profondità richieste.
Il ToF permette di registrare l’intera immagine in una sola volta. Non è necessaria la scansione linea per linea o il movimento relativo tra il sensore e gli oggetti osservati. Il ToF viene spesso classificato come LIDAR (light detection and ranging), ma è un approccio basato sul flash LIDAR, piuttosto che un LIDAR a scansione.
ToF CCd e ToF CW a confronto
Esistono fondamentalmente due modi diversi per misurare il tempo di volo dell’impulso di luce con il ToF: il funzionamento a impulsi, che si basa sulla tecnologia CCD (charge coupled device), e il funzionamento a onda continua (CW).
Mentre il tempo trascorso tra l’emissione e la ricezione dell’impulso di luce è misurato in modalità pulsata, in modalità CW viene determinato lo sfasamento tra gli impulsi luminosi emessi e ricevuti . Entrambe queste modalità di funzionamento presentano vantaggi e svantaggi. La modalità pulsata è più robusta rispetto alla luce ambientale, e quindi più adatta ad applicazioni all’aperto dal momento che questa tecnologia si basa prevalentemente su impulsi di luce ad alta energia emessi in serie molto rapide durante una breve finestra di integrazione. Invece la modalità CW può essere più facile da implementare perché la sorgente luminosa non deve essere estremamente breve, con margini di salita/discesa veloci. Tuttavia, se i requisiti di precisione diventano più rigorosi, saranno necessari segnali di modulazione a frequenza più alta difficili da implementare.
Le dimensioni dei pixel esistenti si traducono in elevate risoluzioni dei chip, che permettono non solo la misurazione della distanza, ma anche il riconoscimento di oggetti e gesti. Le distanze da misurare vanno da pochi cm (<10 cm) a diversi metri (<15 m).
 Purtroppo, non tutti gli oggetti possono essere rilevati allo stesso modo. La condizione, la riflettanza e la velocità dell’oggetto influenzano il risultato della misurazione.
Purtroppo, non tutti gli oggetti possono essere rilevati allo stesso modo. La condizione, la riflettanza e la velocità dell’oggetto influenzano il risultato della misurazione.
Il risultato della misurazione può anche essere falsato da fattori ambientali come la nebbia o una forte luce solare. La soppressione della luce ambientale in quest‘ultimo caso aiuta.
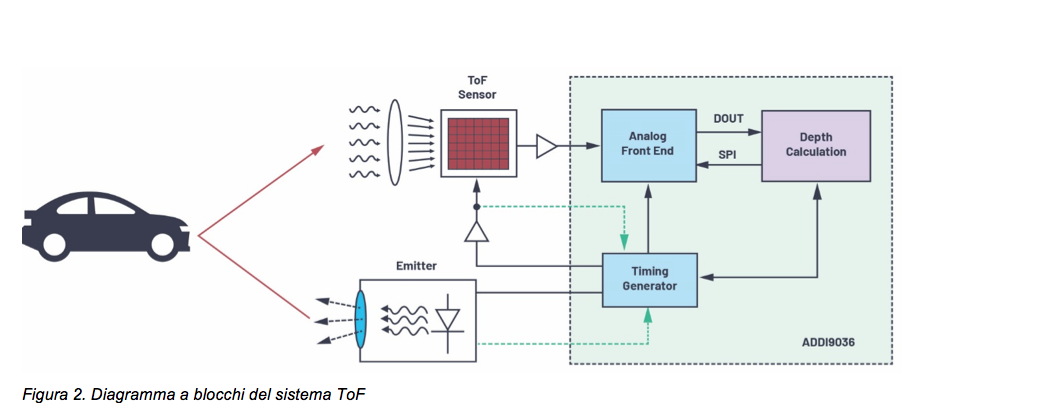 I produttori di semiconduttori come Analog Devices (ADI) offrono sistemi completi per supportare la rapida implementazione di soluzioni ToF 3D. Essi integrano, tra l’altro, l’elaborazione dei dati, il driver del laser, la gestione dell’alimentazione e il software/ firmware in un’unica unità per l’elettronica di controllo. Ulteriori componenti sono rappresentati da un emettitore che genera il segnale ottico modulato in frequenza e un rilevatore che registra il segnale riflesso. Lo schema a blocchi è mostrato in Figura 2.
I produttori di semiconduttori come Analog Devices (ADI) offrono sistemi completi per supportare la rapida implementazione di soluzioni ToF 3D. Essi integrano, tra l’altro, l’elaborazione dei dati, il driver del laser, la gestione dell’alimentazione e il software/ firmware in un’unica unità per l’elettronica di controllo. Ulteriori componenti sono rappresentati da un emettitore che genera il segnale ottico modulato in frequenza e un rilevatore che registra il segnale riflesso. Lo schema a blocchi è mostrato in Figura 2.
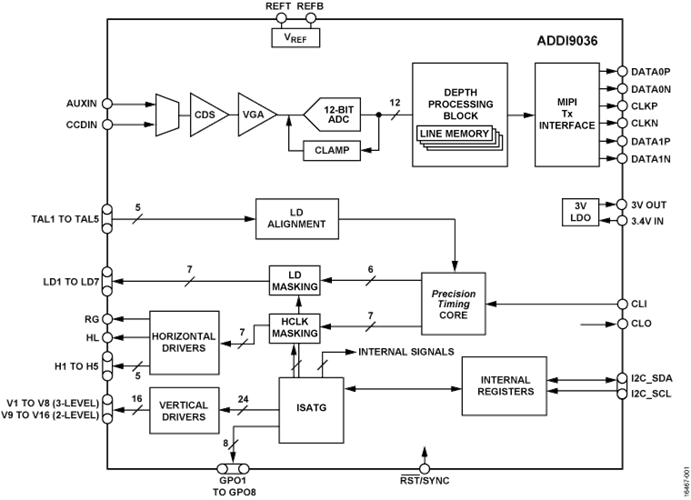 Componenti come un front-end analogico (AFE) con calcolo della profondità integrato sono di grande aiuto per chiunque voglia costruire un sistema di questo tipo. Tra gli altri, l’ADDI9036 fornisce questa funzione: si tratta di un processore completo del segnale CCD ToF con un driver integrato per diodo laser, un ADC a 12 bit e un generatore di clock ad alta precisione che genera la temporizzazione sia per il CCD che per il laser. L’ADDI9036 si occupa dell’elaborazione dei dati grezzi dell’immagine da un sensore CCD VGA per produrre dati di profondità/pixel.
Componenti come un front-end analogico (AFE) con calcolo della profondità integrato sono di grande aiuto per chiunque voglia costruire un sistema di questo tipo. Tra gli altri, l’ADDI9036 fornisce questa funzione: si tratta di un processore completo del segnale CCD ToF con un driver integrato per diodo laser, un ADC a 12 bit e un generatore di clock ad alta precisione che genera la temporizzazione sia per il CCD che per il laser. L’ADDI9036 si occupa dell’elaborazione dei dati grezzi dell’immagine da un sensore CCD VGA per produrre dati di profondità/pixel.
ADI collabora anche con partner di progettazione, con i quali offre congiuntamente moduli finiti e piattaforme di sviluppo. Questi sistemi di valutazione possono essere utilizzati per sviluppare algoritmi specifici del cliente. I moduli finiti e le piattaforme aiutano ad accelerare lo sviluppo, che è particolarmente importante nelle aree di business time-critical, come ad esempio industria e nell’ingegneria automotive.